TK6113 机床数控转台试验模态分析
王 丹 1, 2 ,廖广宇 2, 3
(1 云南省机电一体化应用技术重点实验室,昆明 650031;
2 云南省机械研究设计院,昆明 650031;
3 云南省先进制造技术研究中心,昆明 650031)
摘 要:数控回转工作台是数控机床的重要部件之一,其进给运动均匀性、抗振性能和运行的稳定性,是影响数控机床性能的重要因素。依据实验模态分析理论,利用B&K Pulse 软件和B&K3660C数据采集系统完成随机扫描和数据采集,利用 B&K Reflex Mode模态分析后处理软件,对机床数控转台进行模态试验。
关键词:机床, 数控转台, B&k pulse 软件,试验模态分析
模态分析是研究结构动力特性一种近代方法,是系统辨别方法在工程振动领域中的应用。模态是机械结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。这些模态参数可以由计算或试验分析取得,这样一个计算或试验分析过程称为模态分析。这个分析过程如果通过试验将采集的系统输入与输出信号经过参数识别获得模态参数, 称为试验模态分析。
目前,国内外用于试验模态测试分析的软件和数据采集系统有很多,其中B&K Pulse 软件和 B&K3660C 数据采集前端就是试验模态测试和分析的一种, 当然 B&K Pulse 软件和 B&K3660C还有很多其它的测试和分析功能,我们不在这里作进一步的讨论。本文仅利用其试验模态测试和分析功能对数控工作台进行试验模态分析。
1 试验模态分析
1. 1 试验对象
数控转台是数控机床实现圆周进给运动和分度运动的重要功能部件之一, 数控转台作为承载部件常应用于数控铣镗床和数控铣床上。数控转台不仅可以扩大数控机床的加工范围, 还能提高加工效率。数控转台的精度、刚度、动态特性和稳定性很大程度上影响数控机床的整体性能。数控转台见图 1。
1. 2 试验设备和仪器框图
本试验采用B&K公司生产的硬件设备, 主要采用了B&K4809绝对激振器(2 台) 、B&K2706功率放大器 (2台)对数控回转工作台进行随机激振,B&K 8200力传感器经 B&K2035 前置放大器获取力信号、B&K4506B 三轴向传感器 (5个)获得响应信号,使用B&K 3660C型多分析仪数据采集系统完成随机扫描和数据。使用BK Pulse软件和 Pulse Reflex Mode 模态分析后处理软件进行模态测试和后处理分析。即完成FFT分析、传递函数、 曲线拟合、参数识别、振型显示。

图 1 试验模态用数控转台
下面是试验模态分析仪器连接框图 (见图2):
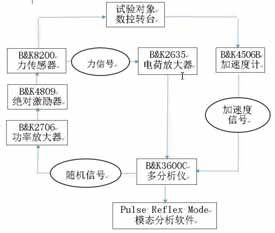
图 2 试验仪器连接框图
1. 3 测点和激励点的布置
本实验采用多点激励多点拾振的随机扫描法对数控转台进行测试,首先建立数控回转工作台的几何模型, 依靠工程经验对该转台进行均匀布点。虽然均匀布点实验会增加实验成本和试验时间, 降低实验效率,但是采取均匀布点具有不容易漏掉关心模态, 模态振型可辨识性强等优点。对数控回转工作台采取均匀布点可以很方便的获得结构的各自由度模态,特别获得较好的低阶模振型。
整个数控回转工作台共布置 132 个测点,测量自由度为132×3=396。(测点布置见图 3)。激励点依据工程经验选择在工作台上,数量为2 个,激励自由度为1个正交方向 (激励点布置见图4)。总 FRF=398×2=792。
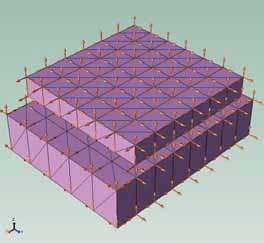
图 3 测点布置图
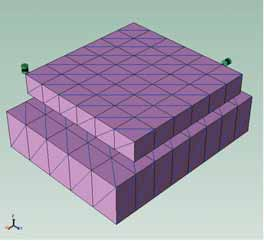
图 4 激励点布置图
1. 4 试验方法
本实验采用多点激励多点拾振的随机扫描法对数控转台进行测试, 对每一个几何测点均测量三向动态响应, 以获得三维模态振型。将测量得到的激励点与各响应点的频响函数 (FRF) 数据导入BK Reflex后处理软件中进行模态参数识别。
2 试验结果及分析
图6为模态分析结果进行验证的常用方法是模态判定准则 (MAC),用于比较振型的一致性。
1 低频刚体运动为主的模态识别结果
阶次 | 频率 Hz | 阻尼比 % | 识别方法 |
1 | 10.80 | 3.2 | polynomial-Z |
2 | 18.95 | 7.5 | polynomial-Z |
3 | 39.22 | 2.1 | polynomial-Z |
4 | 76.83 | 2.7 | polynomial-Z |
5 | 90.35 | 3.4 | polynomial-Z |
6 | 129.24 | 1.4 | polynomial-Z |
7 | 153.85 | 1.3 | polynomial-Z |
8 | 195.18 | 1.1 | polynomial-Z |
9 | 213.05 | 2.7 | polynomial-Z |
10 | 231.87 | 3.2 | polynomial-Z |
频响函数:
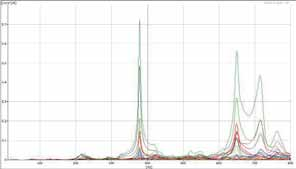
图 5 个测点的频响函数
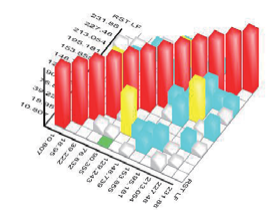
图 6 MAC 图
如图 7 所示:模态振型计算结果是否稳定可用稳态图进行判断。图中横坐标为频率,左纵坐标为模态指示 函数幅值轴, 右纵坐标为假定的极点数目即对应的模态计算阶次,图中的◇▽ ×*符号分别表示假定多项式阶次增加时在给定精度内频响函数分别在整体、振型、频率阻尼处保持稳定状态 [1]。
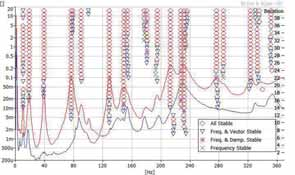
图 7 稳态图
各阶振型如下:
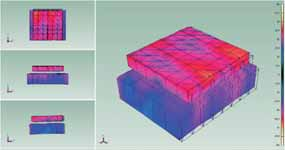
图 9 沿 Y 轴晃动@10.807Hz&3.258%
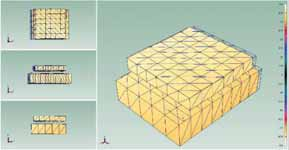
图 10 沿 X 轴晃动@18.950Hz&7.584%
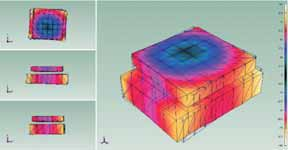
图 11 整体同步扭转@39.222Hz&2.172%
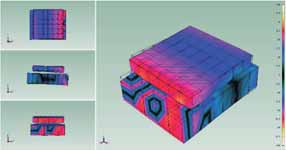
图 12 绕 Y 轴整体转动为主@76.832Hz&2.711%
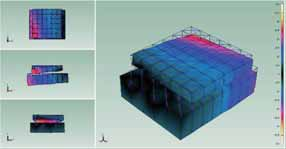
图 13 沿 Z 轴平动为主@90.355Hz&3.452%
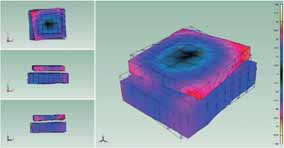
图 14 转动底座同向扭转 129.243Hz&1.484%
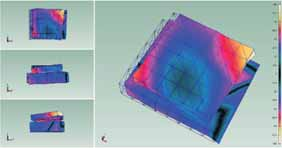
图 15 台面主要 X 轴方向的平动耦合底座运动 153.855Hz&1.370%
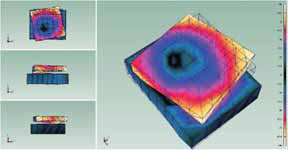
图 16 台面相对于底座的扭转振动为主耦合底座平 195.181Hz&1.181%
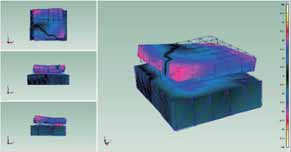
图 17 台面相对于底座的绕 X 轴的转动为主耦合底座平动 213.054Hz&2.793%
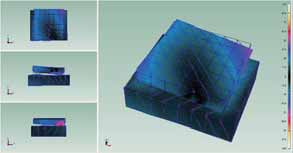
图 18 台面相对于底座的近似绕对角线的转动为主耦合底座平动 227.480Hz&2.852%
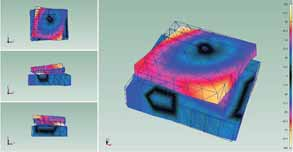
图 19 台面相对于底座的近似绕另一对角线的转动为主及台面转动为辅且耦合底座平动231.880Hz&3.234%
2.2 高阶弹性体模态
阶次 | 频率 Hz | 阻尼比 % | 识别方法 |
1 | 377.8444 | 0.46659 | polynomial-Z |
2 | 423.0261 | 1.73385 | polynomial-Z |
3 | 472.005 | 0.86057 | polynomial-Z |
4 | 548.7634 | 1.66782 | polynomial-Z |
5 | 648.918 | 0.78932 | polynomial-Z |
6 | 715.4081 | 1.1125 | polynomial-Z |
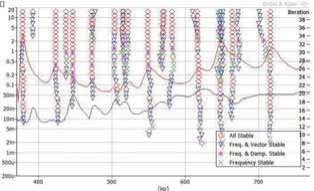
图 20 稳态图
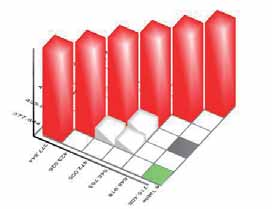
图 21 MAC (模态置信准则) 值图
各阶振型如下:
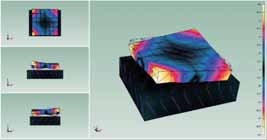
图 22 台面的 1 阶扭转模态 377.844Hz&0.466%
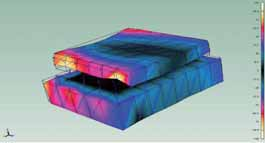
图 23 台面沿 X 轴弯曲模态耦合底座沿 X 轴反向弯曲 423.026Hz&1.734%

图 24 台面沿 X 轴弯曲模态耦合底座沿 X 轴二阶弯曲 472.005Hz&0.86%
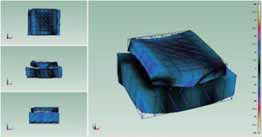
图 25 台面沿 X 轴弯曲模态耦合底座沿 X 轴同向弯曲 548.791Hz&1.685%
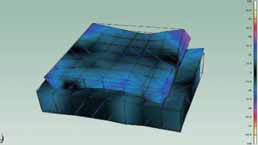
图 26 台面沿 X 轴二阶弯曲模态为主 648.918Hz&0.789%
图 27 台面沿 Y 轴弯曲模态为主 715.408Hz&1.113%
3 试验小结
BK Pulse 软件及 BK3660C 数采前端能很好地完成机械结构的模态试验,其中 BK2706 功率放大器、BK4809 绝对激励器、BK8200力传感器为上世纪80年代购买的设备, 至今已30多年了,其功能和精度保持在出厂时的状态,可见 BK 产品品质优良。
参考文献
[1] 褚志刚, 夏金凤. 机床整机试验模态分析[J]. 机床设计与研究. 2014, 30(6).