无人机载荷雷达振动测试及减振设计
于长帅,骆海涛,刘广明
(中国科学院沈阳自动化研究所,沈阳 110016)
摘 要:激光雷达在低空飞行无人机障碍物规避、化学和生物战剂探测和水下目标探测等军事领域方面已进入实用阶段, 由于受到飞机飞行产生的振动和气流波动的影响,使成像容易产生模糊现象, 甚至损坏激光雷达。为了克服该现象,本文首先对无人机在空中飞行工况下,对激光雷达在无人机安装位置进行振动测试,经测试和分析如果不做减振措施, 激光雷达有可能工作异常甚至损坏; 将激光雷达安装位置处加速度响应作为振动台的输入条件,加工激光雷达模拟载荷, 选择T型减振器的减振措施, 用振动台输入条件下测试载荷的响应; 将该T型减振器应用到无人机上,在无人机飞行工况下,测试无人机激光雷达模拟载荷响 应情况;通过振动试验和无人机飞行工况下测试,最终验证了T型减振器的减振效果, 该减振方法对实现无人机将激光雷达测量与摄影无缝融合具有重要的意义。
关键词:无人机 激光雷达 振动测试 T型减振器
中图分类号:TK417+.127 文献标识码:A
激光雷达技术从最简单的激光测距技术开始,逐步发展了激光跟踪、激光测速、激光扫描成像、激光多普 勒成像等技术,进而研发出不同用途的激光雷达。3D激光雷达是无人驾驶的核心技术之一, 3D激光雷达可实时 获得高精度的三维地图, 用来作为自动驾驶的底层数据; 目前, 激光雷达在低空飞行直升机障碍物规避、化学和
生物战剂探测和水下目标探测等军事领域方面已进入实用阶段,其它应用研究亦日趋成熟,使得激光雷达的商用价值也日益显现出来[1]。
机器人本体结构设计过程中获得准确的动态特性参数是十分重要的,由于机器人本体结构复杂,传动关节多和机电耦合等动态性能参数影响,在实际研究中很难对机器人系统进行准确的理论建模,通过实验测试的分析方法可获得准确的机器人本体实际动态特性的参数,这 就可以了解机器人本体的动态性能、参数识别,为机器人控制系统的设计提供了重要的技术手段[2] , 下图为UR机械臂某种姿态下进行模态测试的模态振型。

a) 自动驾驶车辆

b) 无人机电力巡检
图 1 激光雷达应用
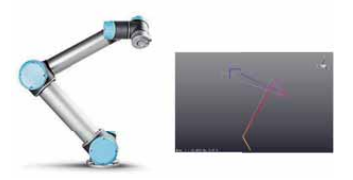
图 2 UR 机械臂某姿态模态测试
无人机机载环境恶劣, 尤其是机载的振动对成像系统的影响尤为严重,为提高光电平台光学载荷成像系统的成像品质和稳定精度, 必须对载体的振动加以隔离和抑制[3]。对于复杂系统,传递路径分析技术 (transfer path analysis 简称 TPA) [4]基于试验测试,用于解决振动源-传递路径-接受体系统的振动问题,是一种非常有效的方法; 橡胶隔振器被动隔振措施结构简单、可靠性高, 不需要系统外能量输入,常被用来做减振隔振的材料[5]。
1 载荷雷达振动测试
1. 1 振动测试
利用本部门的BK3660D数采前端和BK4524B加速度传感器进行载荷雷达安装位置处的振动测试,在无人机激光雷达安装机架位置布置加速度传感器, 如下图所示。
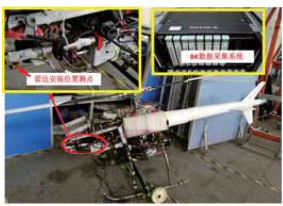
图 3 振动测试
1. 2 数据处理与分析
运行无人机,使无人机在空中飞行,测试雷达安装 点的时域响应曲线和功率谱密度曲线如下图所示。
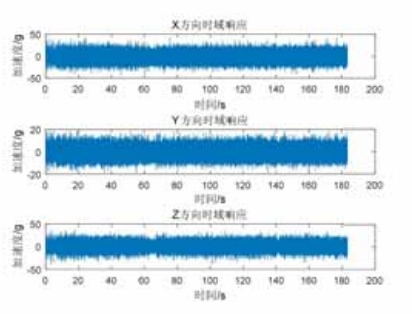
a) 测点 1 三轴时域响应
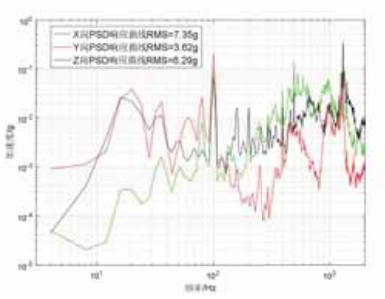
b) 测点 1 三轴 PSD 响应
图 4 雷达安装处测点振动响应情况
已知雷达系统的振动响应许用要求为: 冲击加速度幅值不大于40g; 随机振动在频率5Hz-2000Hz范围内, 均方根值不大于3g。雷达安装点响应接近40g , 雷达安装点的三个轴向的PSD均方根值均超过3g , 如果不做减振措 施, 雷达安装到无人机,很有可能损坏。
2 减振设计
针对雷达安装处振动响应过大,本文选用某单位研 制的T型减振器对无人机与雷达之间隔振处理,如下图所示。
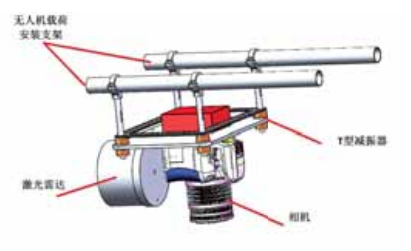
图 5 T 型减振器隔振处理
T型减振器及安装位置的剖视图如下图所示, T型减振器可在三个方向起到减振的作用。
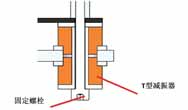

a) T 安装位置剖视 b)实物图
图 5 T 型减振器
2. 1 减振原理
采用减振器对无人机载荷进行减振设计,原则上, 该方式是一个非常有效的减少无人机支架对载荷振动的方式,通过对载荷与无人机支架之间振动的传递分析可知,可简化“载荷支撑激励引起的强迫振动”, 如下图所示。
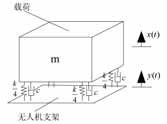
图 6 载荷支撑激励引起的强迫振动
其微分方程为:
![]() (1)
(1)
即为
 (2)
(2)
设激振源位移为 ,通过推导以
,通过推导以 ,
, 为纵坐标, 可以做出不同阻尼系数情况下的幅频响应曲线, 如下图所示。
为纵坐标, 可以做出不同阻尼系数情况下的幅频响应曲线, 如下图所示。
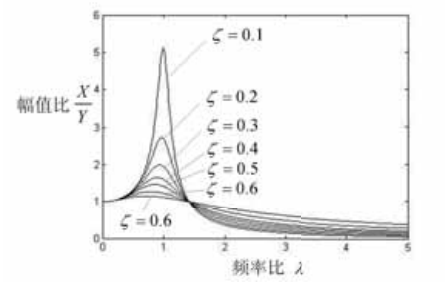
图 7 不同频率比对应的幅值比
从图 7中可以看出, 不论阻尼大小,只有当频率比λ=√2时, 才有隔振效果;但λ也不宜过大,因为λ大意味着隔振器要设计的很柔软,静挠度要很大,相应的体积要很大,并且装置的稳定性也差, 容易摇晃, 另一方面λ> 5后,传递率的变化并不明显,这表明即使将弹簧支撑设计的更软,也不能显著改善隔振效果, 一般实际采用的频率比常在2.5-4.5 之间,相应的隔振效率为 80%-90%[6]。
由于阻尼的存在,传递率随频率的变化是连续的, 且不论阻尼比的大小如何, 所有的传递率曲线均在λ=√2处相交。当 λ<√2 , 阻尼的增加能减小传递率值, 特别是在共振区域(λ=0.8 ~ 1.2 ) 内作用更明显 。 当 λ>√2时, 阻尼增加,传递率的值反而也增加。因此如单纯从隔振观点来看,阻尼增加会降低隔振效果, 但在生产实践中,常会遇到一些不规则的外界冲击和扰动, 为避免弹性支撑的物体产生大幅度的自由振动,常人为地增加一些阻尼以抑制其振幅, 且可使自由振动很快地消失,特别是当隔振对象在起动及停止过程中需经过共振区时, 阻尼的作用就更为重要。
2. 2 减振设计思路
无人机载荷机构减振设计流程, 如下图8所示。具体步骤如下所述:上文中得到的载荷加速度输入作为振动台的输入条件,加工载荷模拟件和振动台工装,用振动台振动试验验证减振措施的减振效果;选择具有减振效果的减振器,将真实载荷装到无人机上,进行无人机工作状态真实载荷加速度响应测试,无人机工作结束后, 检查载荷性能。
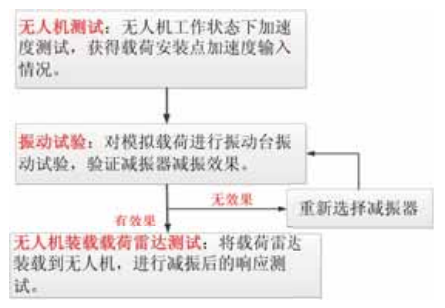
图 8 减振设计流程
2. 3 振动试验
无人机雷达系统模拟载荷选择具有减振效果T型减振器,对无人机雷达系统模拟载荷进行振动试验如下图 9 所示。
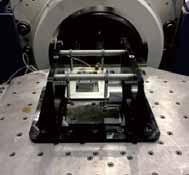
图 9 无人机云雷达系统模拟载荷振动试验
三个轴向随机振动试验,雷达测点的响应结果与振动输入对比结果, 如下表1所示。
表 1 无人机雷达测点振动试验加速度响应情况
X 向总均 方根值/g | Y 向总均 方根值/g | Z 向总均 方根值/g | |
振动输入 | 6.665 | 4.508 | 5.469 |
雷达测点 (减振后) | 0.53 | 0.89 | 2.58 |
2. 4 无人机装载减振器的雷达系统响应测试
现将挂有T型减振器方案的雷达系统模拟载荷装载到无人机上,对无人机工作状态下雷达测点响应进行测试,如下图所示。

图 10 无人机测试
雷达载荷测点的时域响应和PSD响应曲线如下图所示。
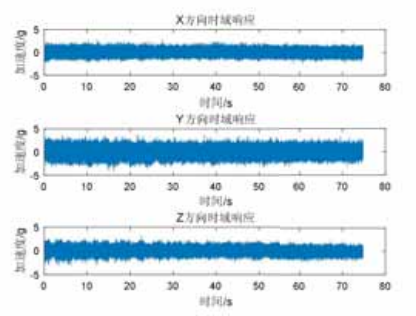
a) 测点 1 三轴时域响应
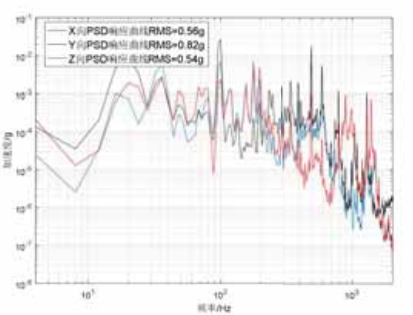
b) 测点 1 三轴 PSD 响应
图 10 无人机空中飞行阶段模拟雷达测点响应
可以看出雷达载荷采用减振方案后,模拟雷达时域最大响应不到5g(小于 40g) , PSD均方根值最大0.82g (小于3g), 说明雷达减振措施是有效的。
3 小结
无人机不采用减振措施, 载荷安装点响应接近40g, 载荷安装点的PSD均方根值均超过3g, 如果不做减振措施, 载荷安装到无人机,很有可能损坏。雷达载荷采用减振方案后,雷达时域最大响应不到5g(小于50g), PSD均方根值最大0.82g(小于3g), 说明本文的减振方法是是有效的。
参考文献:
[1] 宇辰网, 专家解读无人机:近 10 年激光雷达的应用商机[DB/OL], http://www.sohu.com/a/149137401一350244.
[2] 李柳林. 机器人样机设计制造及振动测试[D]. 广西大学, 2012.
[3] Hadden S, Davis T, Buchele P, et al. Heavy load vibration isolation system for airborne payloads[J]. 2001, 4332:171-182.
[4] wyckaert K, van L L. Operational Analysis, Transfer Path Analysis, Modal Analysis-Tools to understand Road Noise Problems in cars-[J]. 台湾振动与噪声工程学会论文, 1995, 50:131-136.
[5] Johnson c, wilke P. The whole-spacecraft vibration isolation system - Its time has come[c]// Space Technology conference and Exposition. 2013.
[6] 严济宽. 机械振动隔离技术[M]. 上海科学技术文献出版社, 1986.