电动车低速提示音室内试验方法研究
沈林邦,谭 龙,王子龙,张 鑫,叶方标
(重庆车辆检测研究院有限公司 国家客车质量监督检验中心 ,重庆 401122)
摘 要:分析了 GB/T 37153-2018《电动汽车低速提示音》标准室内测量方法的技术要求和测量要求,在消声室内对某电动汽车进行了验证试验。结果表明:室内测量背景噪声稳定、速度控制准确,不同测量次数及左右两侧麦克风的频谱信息频谱稳定,频谱峰值一致性较好。
关键词:低速提示音;室内测量方法;频谱分析
中图分类号:U467. 1+2
电动汽车具有排放污染小、能量转化效率高、噪声低等特点, 已成为未来的发展的一种趋势[1] 。噪声小既是电动汽车的优点,同时却也因为过低的车辆声音,在低速行驶时不易引起其他道路使用者的注意,从而带来了新的安全隐患。电动汽车低速行驶提示音系统,可以主动发出一定的声音,主动提示行人及其他道路使用者、有效避免安全事故的发生。美国、欧盟、日本等[2-5] ,均纷纷研究并推出针对电动汽车低速行驶提示音系统的法规,2018年,我国针对该领域也推出了相应的推荐标准GB/T 37153-2018《电动汽车低速提示音》[6]。
目前国内对于电动车低速提示音测量方法的介绍文献较少,2013年,高岳[7]介绍了美国、 日本、欧盟、中国等国对于安静行驶车辆低速提示音的研究情况及相关标准法规的发展历程,分析了提示音的发出时机、声音特性、试验方法等内容; 陆春等[8]于2018年,分析了中国典型环境背景噪声,确定了国内外环境噪声条件差异,在室外进行了电动车低速提示音的验证试验。 目前尚未有文献对标准GB/T 37153-2018《电动汽车低速提示音》 的室内测量方法进行介绍。
本文简单介绍了GB/T 37153-2018标准室内测量方法的技术要求和测量要求,在消声室内,对整车进行低速提示音测量,通过麦克风采集到的声源信号,进行频谱分析,并与标准限值要求进行对比,此外,分析了对比不同测量次数,左右两侧麦克风的频谱信息,本文的研究内容对电动车低速提示音室内测量方法具有一定的 指导意义。
1 低速提示音室内测量方法介绍
GB/T 37153-2018《电动汽车低速提示音》适用于M1和N1类的纯电动汽车、具有纯电动行驶模式的混合动力电动汽车以及燃料电池电动汽车,规定了低速行驶提示音工作的车速范围、声级限值、频率要求、声音类型以及暂停开关等要求和试验方法。该标准分室外道路试验和室内消声室试验两种方法,本文对其室内消声室试验方法有关内容进行介绍。
1.1 技术要求
标准中规定了提示音系统的工作车速范围应至少包含大于0km/h且小于或等于20km/h 。考虑到声音要能被各种年龄段的人很好的识别,因此标准中规定提示音系统的车辆所发出的声音,应至少包含两个表1中所规定的1/3倍频程,且至少有一个1/3倍频程在1600 Hz(含)以下。 这两个1/3倍频程的最低声级,应不低于表1中规定的对应的声级限值,同时还限制提示音系统的车辆在行驶时发出的噪声最大不应超过75dB(A)。
表 1 最低声级限值
频率(Hz) | 匀速向前行驶车速 dB(A) | 匀速倒挡 行驶车速 dB(A) | ||
10 km/h | 20 km/h | 6 km/h | ||
计权声级(总 声级) | 52.0 | 58.0 | 49.0 | |
160 | 47.0 | 52.0 | ||
200 | 46.0 | 51.0 | ||
250 | 45.0 | 50.0 | ||
315 | 46.0 | 51.0 | ||
400 | 47.0 | 52.0 | ||
500 | 47.0 | 52.0 | ||
630 | 48.0 | 52.0 | ||
1/3 | ||||
倍频 程 | 800 1000 1250 | 48.0 48.0 48.0 | 53.0 53.0 53.0 | |
1600 | 46.0 | 51.0 | ||
2000 | 44.0 | 49.0 | ||
2500 | 41.0 | 46.0 | ||
3150 | 38.0 | 43.0 | ||
4000 | 36.0 | 41.0 | ||
5000 | 33.0 | 38.0 | ||
每一种试验条件下,车辆两边都应进行至少4次测量, 且需保证每次测量结果偏差在2dB(A)以内。
为了便于行人及其他道路使用者,能够明确地识别车辆车速的运行状态,提示音系统应具有模拟多普勒效应功能, 因此标准对声音频率偏移有所要求,在5~20 km/h的速度范围内,频移速度满足≥0.8%/(km/h) 。频移公式如下式所示:

f(i,车速)为给定车速值处的频率,f(i,参考)为5km/h或记录的最低车速处的频率,v(试验)为实际车速或模拟车速,对应于频率f(i,车速),v(参考)为实际车速或模拟车速,对应于频率f(i,参考)。
1.2 测试要求
车辆的运行状态分为10km/h和20km/h的匀速前进试验以及6km/h倒车试验。前进状态和倒车状态的麦克风布置分别如图1(a)和图1(b)所示。
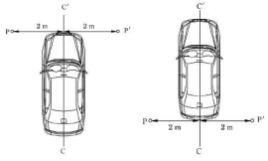
(a)前进状态 (b)倒车状态
图 1 麦克风布置图
同时当车辆以5km/h~20 km/h范围内的某一速度前进时,提示音系统所发出的声音中,至少有一个表1中所规定的1/3倍频程的频率会随车速的增加而变大,或随着车速减小而变小,故需进行频移测试。
测试时按照标准要求,麦克风应当放置在如图1所示 的PP’位置,其到CC’线的距离为2.0 m±0.05 m ,在地表面向上1.2 m±0.02m,基准方向应保持水平,并垂直指向车辆运行的CC’线。车辆试验质量为整备质量+75 kg,试验时,车门及车窗应关闭,且车门锁死
2 试验测试结果与分析
2.1 仪器设备介绍
测试时利用两个Brüel & Kjær 4966型自由场型麦克风,通过Brüel & Kjær 3660型数据采集器采集声音信号,麦克风及数据采集器示意图如图2所示。
(a)麦克风

(b)数据采集器
图 2 麦克风及数据采集器
2.2 背景噪声测量
为了验证某车辆低速提示音功能是否满足法规要求, 对该车辆进行室内低速提示测试,试验前需进行背景噪声测量,测试时麦克风的位置应与其在车辆试验中的位 置保持一致。测量未放置车辆时滚筒、底盘测功机以及其他试验设备发出的噪声,测量时间为10秒。根据标准要求应分别测试不同转毂速度下的背景噪声,本次试验仅测量底盘测功机20 km/h时的半消声室内背景噪声作为参考。因为理论上转毂速度越高,其发出的噪声越大。若小于20km/h测试车速的提示音系统发出的噪声总声压级高于此背景噪声10dB(A)以上和1/3倍频程噪声的均方根值结果高于此背景噪声相应倍频程6dB(A)以上,则可以将此测试车速的测试结果可作为最终结果;否则需要再分别测试各相应转毂车速的背景噪声,作为相应车速测试结果的判定或修正依据。然后将麦克风采集到的声音信号传输到数据处理软件进行FFT分析。选取左右两个麦克风的背景噪声最高A计权声级作为背景噪声的最终结果,并记录1/3倍频程频谱的结果。本次试验中仅测量转毂20km/h时的室内背景噪声,测量结果如表2所示。试验中背景噪声的最大值到最小值的波动在2dB(A) 以内,依据标准要求,选择A计权声级最大的一侧即左侧,作为背景噪声的最终结果。
表 2 转毂 20km/h 室内两侧测试位置背景噪声
频率(Hz) | 左侧平均 dB(A) | 右侧平均 dB(A) |
计权声级(总声级) | 31.2 | 27.3 |
160 | 20.9 | 19. 1 |
200 | 19.4 | 12. 1 |
250 | 22.2 | 16.0 |
315 | 24.0 | 19.7 |
400 | 20.3 | 15.9 |
500 | 22.0 | 17.7 |
630 | 20.6 | 16.5 |
1/3 800 | 19.0 | 15.9 |
倍频程 1000 | 16.8 | 14.2 |
1250 | 14.9 | 11.6 |
1600 | 15.8 | 13.3 |
2000 | 14. 1 | 10.9 |
2500 | 14.8 | 11.4 |
3150 | 13.8 | 10.9 |
4000 | 13.2 | 10.6 |
5000 | 12.7 | 11.0 |
2.3 前进状态低速提示音测量
前进状态下试验车辆及麦克风布置如图 3 所示。

图 3 前进状态车辆与麦克风布置图
试验时,每个车速状态测量4次,每次测量时间为5s, 单次测量的时域声音信号如图4所示。
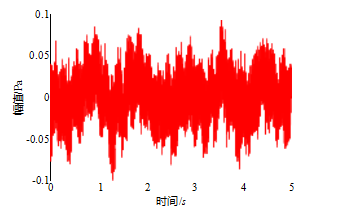
图 4 前进状态 10 km/h 左侧麦克风时域信号图
对采集到的声音信号进行1/3倍频程处理,处理结果如图5所示。可见左右两个麦克风采集到的声音信号频谱基本一致。统计各中心频率的幅值结果,依据标准要求,两边测量结果中的最低值及最低值的1/3倍频程频谱作为最终的结果,并且总声压级需进行按照四舍五入原则就近取整,如表3所示。
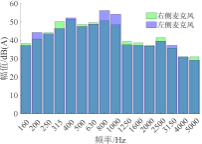
图 5 前进状态 10 km/h 左右侧麦克风 1/3 倍频程结果
表 3 试验车辆 10km/h 室内左右两侧测试结果
频率(Hz) | 左侧平均 dB(A) | 右侧平均 dB(A) | 背景噪声 dB(A) | 右侧与背噪 差值 dB(A) | 标准限值 dB(A) |
计权声级(总声级) | 61.0 | 59.0 | 31.2 | 27.8 | 52.0 |
160 | 37.2 | 38.2 | 20.9 | 17.3 | 47.0 |
200 | 44.2 | 40.7 | 19.4 | 21.3 | 46.0 |
250 | 43.5 | 44. 1 | 22.2 | 21.9 | 45.0 |
315 | 46.4 | 50.2 | 24.0 | 26.2 | 46.0 |
400 | 52.2 | 51.4 | 20.3 | 31. 1 | 47.0 |
500 | 47.5 | 48.5 | 22.0 | 26.5 | 47.0 |
630 | 48.8 | 49.6 | 20.6 | 29.0 | 48.0 |
1/3 倍频 800 | 56.2 | 50.6 | 19.0 | 31.6 | 48.0 |
程 1000 | 54.2 | 48.4 | 16.8 | 31.6 | 48.0 |
1250 | 37.6 | 39.3 | 14.9 | 24.4 | 48.0 |
1600 | 37.3 | 38.6 | 15.8 | 22.8 | 46.0 |
2000 | 36.8 | 37.3 | 14. 1 | 23.2 | 44.0 |
2500 | 39.5 | 41.4 | 14.8 | 26.6 | 41.0 |
3150 | 37.2 | 35.7 | 13.8 | 21.9 | 38.0 |
4000 | 31.0 | 30.9 | 13.2 | 17.7 | 36.0 |
5000 | 29. 1 | 30.9 | 12.7 | 18.2 | 33.0 |
由表3可知,右侧麦克风采集到的结果满足标准要求,由表中右侧与背景噪声差值一列结果可见,10km/h测量速度下每个重点1/3倍频程车辆发声系统噪声值均高于背景噪声相应倍频程6dB(A),且车辆发声系统噪声值高于背景噪声总值27.8 dB(A),即无需进行背景噪声修正。右侧麦克风采集到的结果与标准总声压级和各1/3倍频程频谱结果对比可见,右侧麦克风采集到声音信号的总声压级为59.0 dB(A) ,符合标准规定的高于52.0 dB(A) ,低于75 dB(A)的要求。同时1600 Hz以下高于标准限值的有6个倍频程,1600 Hz以上高于标准限值的有1个倍频程,满足标准规定的“至少有一个1/3倍频程在1600 Hz(含)以 下。这两个1/3倍频程的最低声级,应不低于标准规定的对应的声级限值。”[6]
表4为20km/h车辆试验速度时的测量结果,右侧总声压级低于左侧,选择右侧麦克风采集到的结果为试验结果。由于10km/h车辆试验速度车辆发声系统的噪声值已经高于背景噪声10dB(A)以上,故20km/h车辆试验速度车辆发声系统未与背景噪声进行对比。 由表中结果可见,右侧总声压级为65.0 dB(A) ,符合标准规定的高于58.0 dB(A) ,低于75dB(A)的要求。同时1600 Hz以下高于标准限值的有6个倍频程,1600Hz以上高于标准限值的有5个倍频程,满足标准规定。
表 4 试验车辆 20km/h 室内左右两侧测试结果
频率(Hz) | 左侧平 均 dB(A) | 右侧平 均 dB(A) | 标准限 值 dB(A) |
计权声级(总声级) | 66.0 | 65.0 | 58.0 |
160 | 43. 1 | 43.8 | 52.0 |
200 | 47. 1 | 47.6 | 51.0 |
250 | 46.6 | 47.9 | 50.0 |
315 | 56.5 | 50.7 | 51.0 |
400 | 53.2 | 51.2 | 52.0 |
500 | 58.5 | 56.5 | 52.0 |
630 | 53.3 | 55.8 | 52.0 |
1/3 倍 800 | 57.0 | 53.2 | 53.0 |
频程 1000 | 60.6 | 57.8 | 53.0 |
1250 | 51.9 | 53.3 | 53.0 |
1600 | 53.0 | 53.4 | 51.0 |
2000 | 51.3 | 51.8 | 49.0 |
2500 | 52.4 | 54. 1 | 46.0 |
3150 | 50.2 | 48. 1 | 43.0 |
4000 | 44. 1 | 45.2 | 41.0 |
5000 | 43.3 | 46. 1 | 38.0 |
2.4 倒车状态低速提示音测量
该状态下,麦克风距离CC’线、地表面的距离与前进状态下相同,此时麦克风位于汽车尾部位置。试验时转毂反向转动,转动速度为6km/h 。试验现场布置图如图6所示。

图 6 倒车状态车辆与麦克风布置图
表5为试验车辆倒车6km/h左右两侧总声级,选择右侧较小值为试验结果,即倒车时总声压级为53.0 dB(A), 与20km/h时的背景噪声对比,相差21.8 dB(A) ,无需进行修正, 同时满足标准高于49.0 dB(A) ,低于75 dB(A) 的要求。
左侧平均 dB(A) | 右侧平均 dB(A) | 标准限值 dB(A) | |
计权声级(总声级) | 56.0 | 53.0 | 49.0 |
表 5 试验车辆倒车 6km/h 室内左右两侧测试结果
2.5 频移结果分析
试验时选择的测试速度为5 km/h 、10 km/h 、15 km/h 及20km/h,两侧麦克风采集各速度前进状态下的声音信号,然后进行FFT处理,平均自功率谱应使用汉宁窗, 重叠率为66.7% ,为了实现每个目标条件下频移的分离, 频率分辨率设为1 Hz 。将处理得到的频谱数据导入到Matlab中进行处理,左侧麦克风各状态下的测量结果如图7所示。黑色点划线、蓝色虚线、红色实线、绿色实线分别为5 km/h 、10 km/h 、15 km/h及20 km/h速度下测量结果。图7(a)、(b)分别为左右侧125~6300 Hz的频谱结果,可见左右侧频率信息类似,频谱峰值集中于125~ 1000 Hz 之间,对左侧进行细化,如图7(c)所示,选择红色椭圆中的一组峰值进行分析,分析结果如图7(d)所示。由图7(d)可知,5 km/h 、10 km/h 、15 km/h及20 km/h所对应的峰 值形状类似,峰值出线的先后顺序与速度从小至大的顺 序一致,其峰值频率分别为839 Hz 、886 Hz 、933 Hz 、 981 Hz。
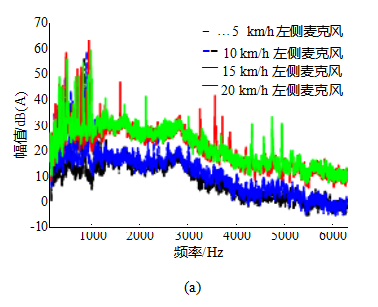
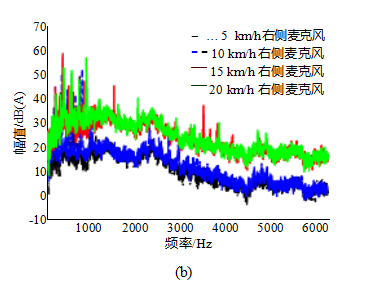
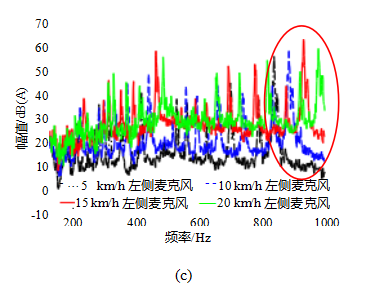
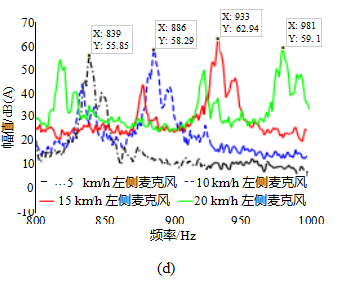
图 7 麦克风频移结果
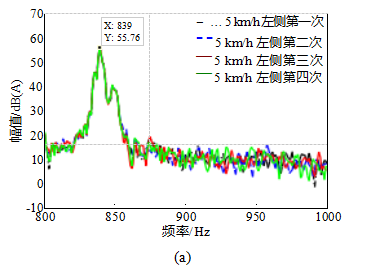
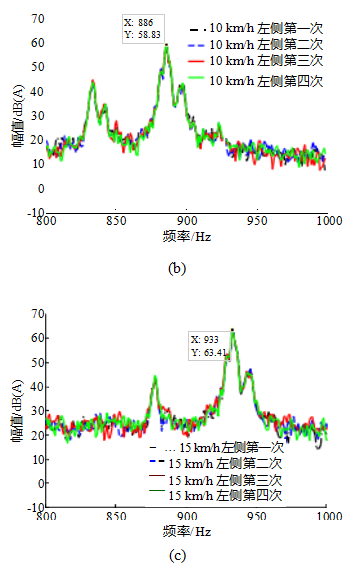
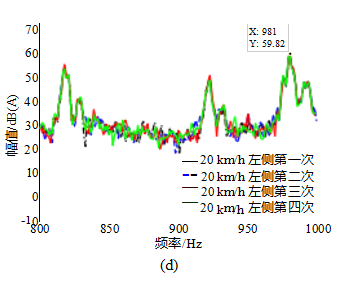
进一步,为比较不同测量次数各速度下频谱的差异, 图8分别给出了不同速度下四次测量结果对比,黑色点划线、蓝色虚线、红色实线、绿色实线分别为5km/h、10 km/h、15 km/h及20km/h速度下四次测量结果,结果可见,相同速度不同测量次数下各频谱峰值稳定。各次测量结果,主瓣频率和幅值一致,仅旁瓣略有波动,不同速度下其峰值频率分别为839 Hz 、886 Hz、933 Hz、981 Hz ,与图 7(d)中结果一致。
此外,进行了左右两侧各速度平均频谱对比,如图9所示。各图中黑色实线、红色点划线分别代表左侧和右侧麦克风采集到声音信号的频谱信息,对比可见,相同速度下,左右两侧频谱中峰值一致,仅幅值存在偏差,且右侧峰值小于左侧峰值,与右侧总值小于左侧总值规律一致。各速度下主瓣峰值分别为:839 Hz、886 Hz、 933 Hz、981 Hz。
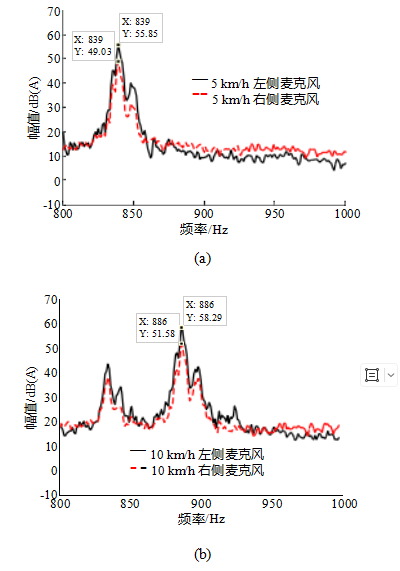
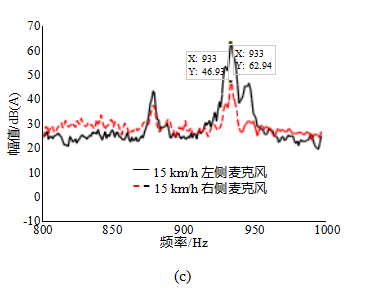
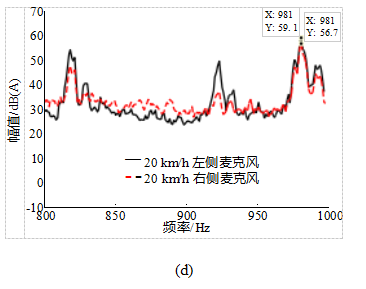
图 9 左右两侧麦克风各速度频谱对比
由图8和图9对比结果可见,左右两侧麦克风各速度 在不同测量次数下采集的声音信号峰值稳定,故选择图 7(d)中确定的频率峰值,根据公式(1)进行频移计算,选择5km/h为参考速度,5km/h所对应的频率为参考频率, 表6给出了所选择频率的频移del−f计算结果,结果可见,10km/h与5km/h 、15km/h与5km/h 、20km/h 、5km/h的频移皆为1. 1% ,满足标准规定的大于0.8%要求。
表 6 频移计算结果
速度km/h | 频率 Hz | 频移/(km/h) |
5 | 839 |
|
10 | 886 | 1. 1% |
15 | 933 | 1. 1% |
20 | 981 | 1. 1% |
3 总结
本文介绍了电动车低速提示音室内测量方法的技术要求和测试要求,并进行了现场试验,主要结论如下:1) 室内测量可以获得较低的背景噪声,且背景噪声稳定,相比于室外测量,较容易满足测试车辆设备发出的噪声值高于背景噪声10dB(A)要求;2)室内测量相比于室外测量而言,背景噪声稳定、速度控制准确,各次测试频谱信息一致性较好;3)提示音频率为固有特性,不随测量位置的不同而变化,在该次试验中,左右两侧麦克风采集到的声音信号频谱峰值一致。
参考文献
[1] Nanda G, Kar N C. A survey and comparison of haracteristics of motor drives used in electric vehicles[C]. IEEE, 2006.
[2] Boussard P, Dendievel C, Hourcade S, et al. EV exterior Sound Alarm for pedestrian (AVAS): process for Sound Design and 3D sound Simulation[C]. Institute ofNoise Control Engineering, 2017.
[3] Fortino A, Eckstein L, Viehöfer J, et al. Acoustic vehicle alerting systems (AVAS)-regulations, realization and sound design challenges[J]. SAE International journal ofpassenger cars-mechanical systems. 2016, 9(2016-01-1784): 995-1003.
[4] Kamata M. Guideline on measures against the quietness of hybrid vehicles, etc[J]. Informal document No. GRB-52-03, 52nd GRB.
2010: 6-8.
[5] Tabata T, Konet H, Kanuma T. Development of Nissan Approaching Vehicle Sound for Pedestrians: How to solve the trade off between Quietness and Pedestrian safty ofthe Electric vehicles?[R]. SAE Technical Paper, 2011.
[6] GB/T 37153-2008《电动汽车低速提示音》[S]. 2018: 12-28.
[7] 高岳. 安静行驶车辆低速提示音标准法规国际状况及发展趋势分析[J]. 科技创新与应用. 2013( 19): 44-45.
[8] 陆春,谢东明,徐金国,等. 电动汽车低速提示音标准与试验研究[J]. 中国汽车. 2018( 12): 49-53.